Ressources
News
Annuaire
Galerie
Forums
Contact
|
.: Skins :.
|
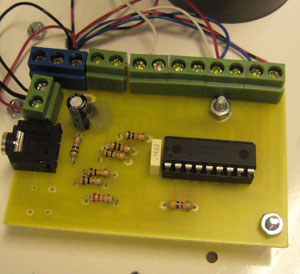
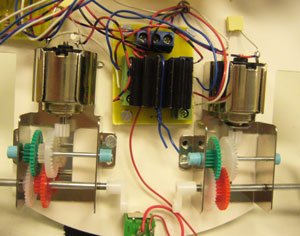
 Réalisation d'un robot programmable en vue de participer à un concours de robotique. Réalisation d'un robot programmable en vue de participer à un concours de robotique.PROTOTYPE VERSION N°2 Le second prototype utilise un pont en H (SN754410) pour piloter les moteurs en marche avant et arrière. Une carte triple detecteur de ligne à CNY70 est utilisée. La partie commande : carte à Picaxe 18X On dispose de 8 sorties et 5 entrées, 1 bouton reset et un connecteur pour la programmation avec le logiciel Programming Editor La carte pré-actionneur pour les moteurs gérant la marche avant, la marche arrière pour 2 moteurs 1A par moteur
On
dispose de 4 sorties pour les 2 moteurs, de 4 entrées venant de la P.C
+ 1 pouvant servir à faire varier la vitesse des moteurs (signal PWM).
On a également à disposition 1 alimentation +5V et une autre +VCC
facultative pour alimenter les moteurs jusqu'à 36V (K1 permet de
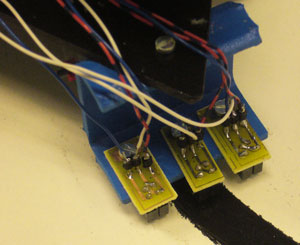
connecter le +5V au +VCC). La carte pré-actionneur à ULN2804 pour connecter buzzer, DEL etc. On dispose de 8 sorties La carte transmetteur permettant de connecteur 3 capteurs comme les CNY70 Les capteurs optiques sont déportés pour faciliter la detection d'une ligne au sol.
Téléchargement de tous les fichiers nécessaires à la réalisation de l'électronique de la version 2 Le câblage de la version 2 :
A voir, les photos et les vidéos des robots du collège Jeanne d'Arc de Clermont Ferrand
| ||||||||
Pas de commentaires, soyez le premier à commenter ce dossier ! |